 サーボモーターの回転角度は何度か?調べる回路
サーボモーターの回転角度は何度か?調べる回路
市販のラジコンなどに使われているサーボモ-ターを
ロボットなどに応用している物を見かける
また、雑誌の記事などでも使い方が書かれている。
それらには、周期が15~20msくらいでパルス幅1.5ms、
±0.5msのパルスを与えると90度の角度で動く、とある
しかしながら、小生の実験では軸に使われているVRの回転角度は
220度くらいのものが使われているので、
180度くらい動いた記憶があった。
そこで、製造メーカーでどのくらい違うのか、
回転角度は何度かを調べる回路を作った。
回路・基板.pdf(85kb)
回路を考察
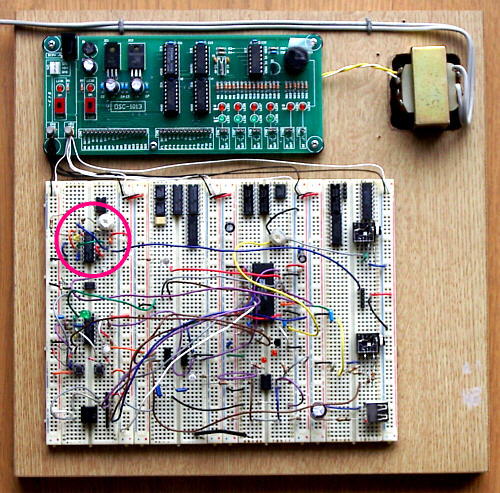
市販のブレッドボードを使って回路を考察する。赤丸の中。
音声ROMにメッセージや音楽を書きこむ回路を考察中だったので
空きスペースを利用した。
上部のボードは「ディジタル回路入門」の基板です。
プリント板部品面配置図とパターン図を考察
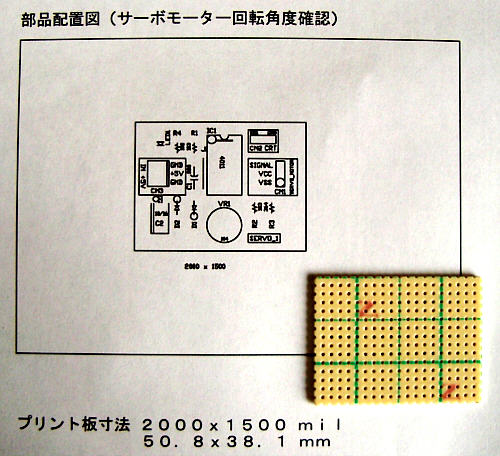
回路が出来あがったら、プリント基板も考察する。
回路図を見ながら配置を検討しつつ試作するよりも早く仕事が終わり、
仕上りがきれいです。
市販の穴あき基板を配置図の大きさに切断する。
穴あき基板に配置図を貼り付け、部品を差込み半田する
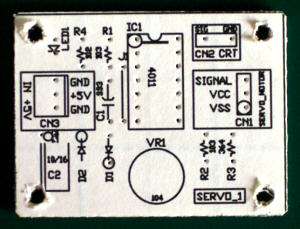
配置図を窓ガラスなどに裏を手前にしてセロハンテープで固定する
両面のり付きシート(両面テープの大きいもの)をその上に貼り付ける。
穴あき基板を貼り付け、部品の穴を錐であけ、部品を差込み図面のとうりに
パターンを作り半田する。
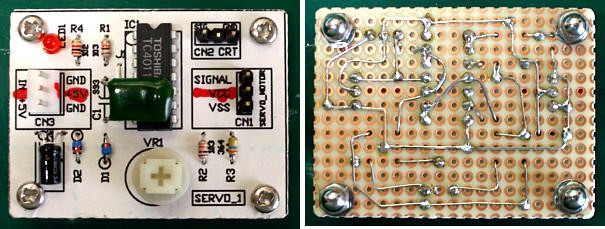
部品面、後で間違えないように+5Vに赤印を。
VRが穴のピッチと合わず1.25ミリずれた。
VRが穴のピッチと合わず1.25ミリずれた。
パターン面は図面のとうりにはりまわす。
ゴム足の代わりに袋ナットを用いた。
ゴム足の代わりに袋ナットを用いた。
実験です
出来あがったので通電です。
左の端子にDC5Vを、上の端子はオッシロスコープをつなぎます。
右の端子にサーボモーターをつなぎます。VRをまわすとサーボモーターも
回転します。製造メーカーにより回転する方向が違ったり、回転の中央の
パルス幅が違うのが判ります。
- 回路の仕様
- パルス幅0.4~3.2mS、周期20mS
サーボモーター停止時 5V12mA、最大500mA
サーボモーター停止時 5V12mA、最大500mA
データが製造メーカーによって違います
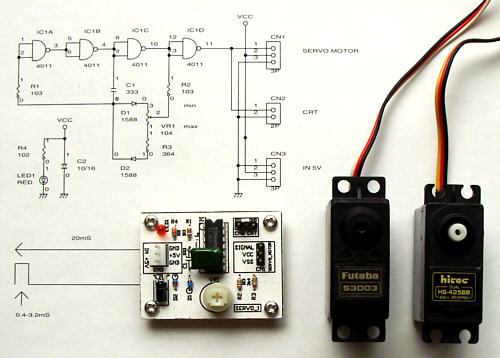
結果報告
| 製造メーカー | 型番 | 最小 | 中心 | 最大 | 定常電流 | 備考 |
|---|---|---|---|---|---|---|
| 左:Futaba | S3003 | 0.4ms | 1.35ms | 2.3ms | 5V12mA | VRの回転と逆 |
| 右:hitec | HS-425BB | 0.9ms | 1.7ms | 2.5ms | 5V12mA | VRの回転と同一 |
|
回転角度は共に180度位であったが、実用トルクが得られるかは不明 範囲外のパルス幅を与えると、オッシロの波形は乱れ、 電流は400~500mAとなる |
||||||