 ライントレース Lni-715a
ライントレース Lni-715a
ゲートICを4個、Hブリッジ構造のモータードライバー専用ICを1個使用。
後退が可能になる。
自作される方は、モータードライバーIC:LB1648(SANYO)が入手可能かをお調べください。
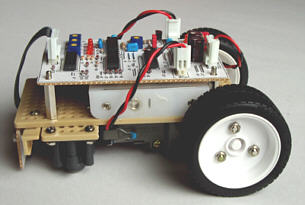
外観
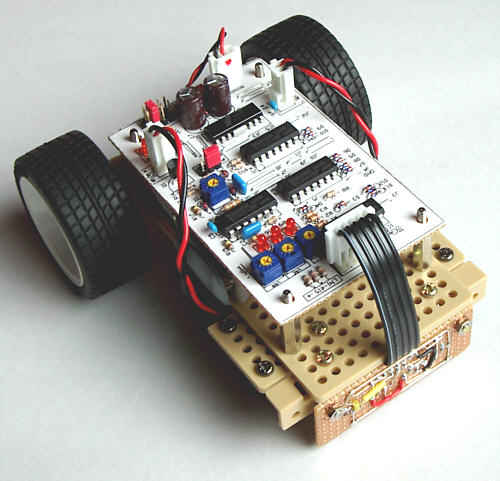
前方の支柱とギヤーボックスの取りつけは皿ビスを使用する。
ギヤーボックスはこれ以上前にはいかない。
電池はアルカリ乾電池でOK。単三4本。
回路図
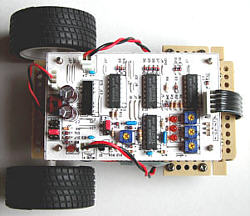
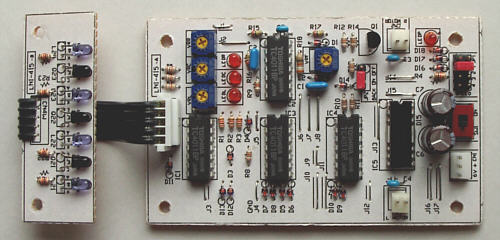
プリント板部品面とパターン図を考察
回路が出来あがったら、プリント基板も考察する。
市販の穴あき基板を配置図の大きさに切断し、部品面配置図を貼付け、
部品を差し込む。
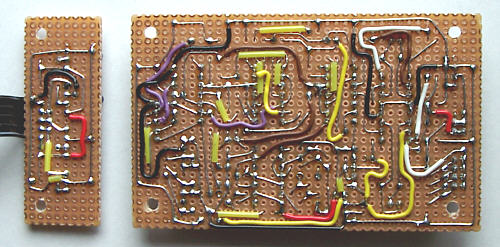
配線には根気と努力を必要とする。後のチェックを忘れずにね!!
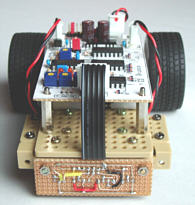
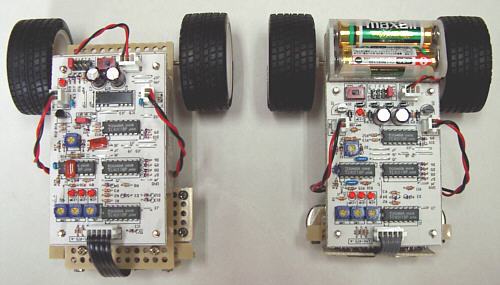
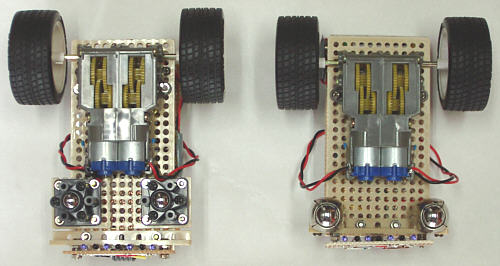
比較
左: IC5個 このページのもの。
右: IC4個 Lni-415a、別ページのもの
前輪のキャスターの大きさで車体の前部が違うのが判る。全長も違う。
右: IC4個 Lni-415a、別ページのもの
前輪のキャスターの大きさで車体の前部が違うのが判る。全長も違う。
走行実験の報告です
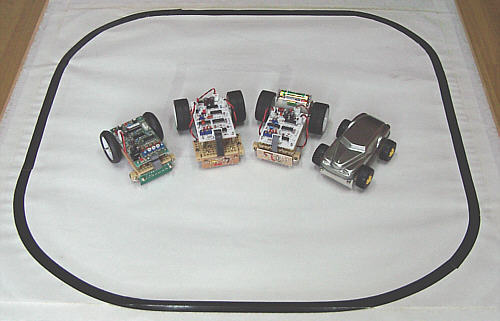
出来あがったので調整と走行実験です。
電源スイッチを接にするとすぐに走り出します。注意が必要です。
コースは、周回コースを900mm角のベニヤ板に白い紙を貼付け、
ビニールテープで作ったものを使った。
機材左から、
ライントレース5、本機、415a、ライントレース3
走行実験も速度は上記のとうりでした。
ライントレース3より本機の方が早かった。めでたし。めでたし。
マイコンを減算タイマーで動かしモーターを制御すると、
減算しているときはセンサーを見ることが出来ない。
この為、頭を左右に振る回数が多く速度が出ない。
ゲートICで回路を作ると、常時センサーを見ているので、
すぐに波形を変更でき、頭を左右に振る回数が少ない。このため早く走れる。
早く走ってコースを逸脱し戻る回数が多くなると周回時間を要す。
ライントレース5はセンサーが5個なので本機と比べるには酷というものです。