ライントレース Lni-415a
ライントレース Lni-415a
マイコンを使わないライントレースカー
ゲートICを4個 モーター駆動用にトランジスタを2個 使用
マイコンを使わないでライントレースカーを作るには、
速度制御と方向変更が出来れば完成です。
PWM回路をゲートICで構成すれば、配線だけで動きます。
マイコンのようにプログラム作りで悩む心配も不要です。
これは、プログラム作りの楽しみがないとも言えます。
で、考察。
周期が4ミリセコンドでパルス幅が1ミリ、2ミリ、
3ミリの波形を発生させ、これらを前のラインセンサーの信号で、
後ろの左右2個のモーターへ配分する。
センサーの信号がない場合は停止する。後退はなしで回路を検討する。
ゲートICとして1種類のものを複数個使う事にして、4011に決定。
使用個数は回路で決定する。
回路を考察
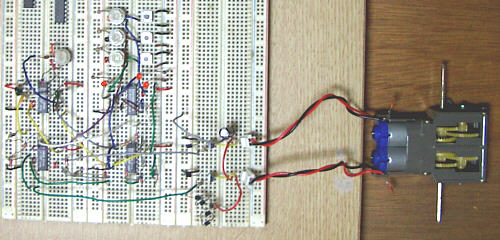
市販のブレッドボードを使って回路を考察する。
ラインセンサーの代わりにスイッチで疑似信号を入力する。
4個の4011を使った回路が出来た、下図。
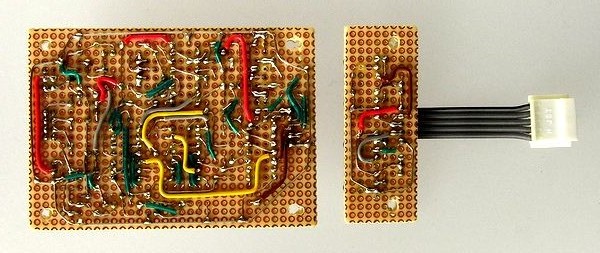
プリント板部品面とパターン図を考察
回路が出来あがったら、プリント基板も考察する。
市販の穴あき基板を配置図の大きさに切断し、部品面配置図を貼付け、 部品を差し込む。
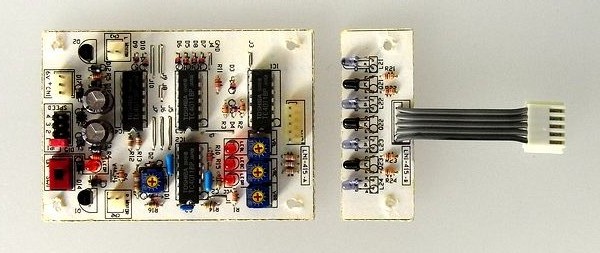
混み入っているので注意して配線をする。
センサー基板との接続を、後でコネクター付きに変更した。
シャーシーを作りボードを取りつける
タミヤのツインモーターギヤボックスとユニバーサルプレートを使い車体を作る。
車輪は、ボールキャスターを、後輪はスポーツタイヤを使った。
電池は、単三4本だが、アルカリ乾電池より、ニッケル水素電池の方が、
電圧が変らず、VRの調整によい様です。
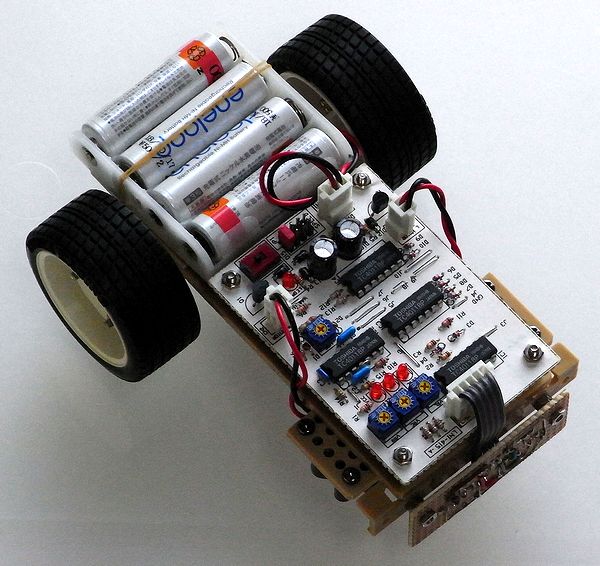
外観
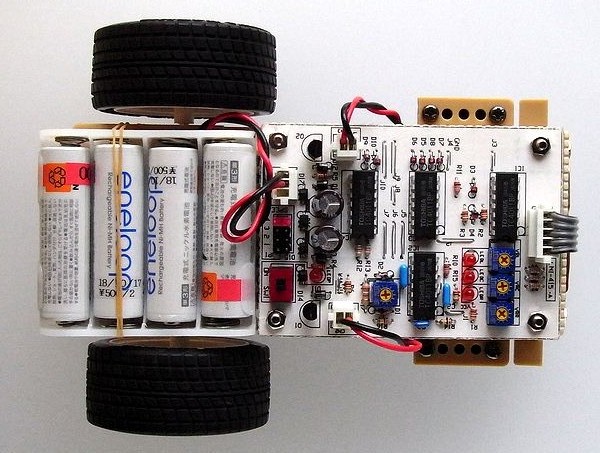
上から
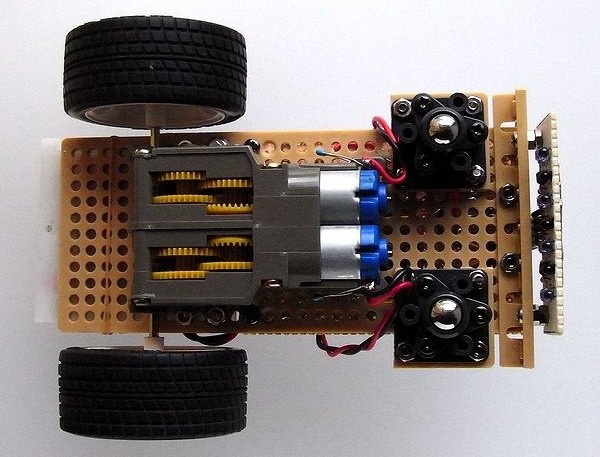
下から
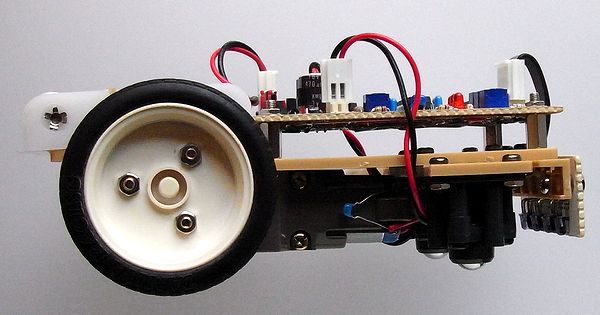
横から
走行実験の報告です